Architecture & Workflow Overview
This page provides a high-level introduction, conceptual workflow, and block-diagram–driven understanding of the GRaTeR-JAX codebase. It is intended to help new users and contributors quickly understand how the different components fit together: from user scripts and notebooks, through optimization logic, down to JAX-compiled disk models and gradients.
1. What is GRaTeR-JAX?
GRaTeR-JAX is a JAX-native, differentiable implementation of the GRaTeR scattered-light debris disk framework from Augereau+ 1999. It is designed to:
Generate scattered-light images of circumstellar debris disks
Perform fast, accurate model fitting using automatic differentiation
Support MCMC-based probabilistic inference to estimate disk parameters and uncertainties
Run efficiently on CPU/GPU via JAX JIT compilation
The library cleanly separates:
Physical disk models
Objective functions (likelihoods + gradients)
Optimization / inference orchestration
2. End-to-End User Workflow
At a high level, a typical GRaTeR-JAX workflow looks like:
Define a disk model (density profile, scattering phase function, PSF handling)
Specify initial parameter guesses and model configuration
Load a target image, error map, and optional empirical PSF
JIT-compile the forward model and gradients
Run either:
Deterministic optimization (SciPy), or
Bayesian inference (MCMC)
Inspect best-fit parameters and diagnostics
This flow is summarized visually in the block diagram below.
3. High-Level Optimization Flow Diagram
The diagram below represents the conceptual optimization pipeline exposed to the user.
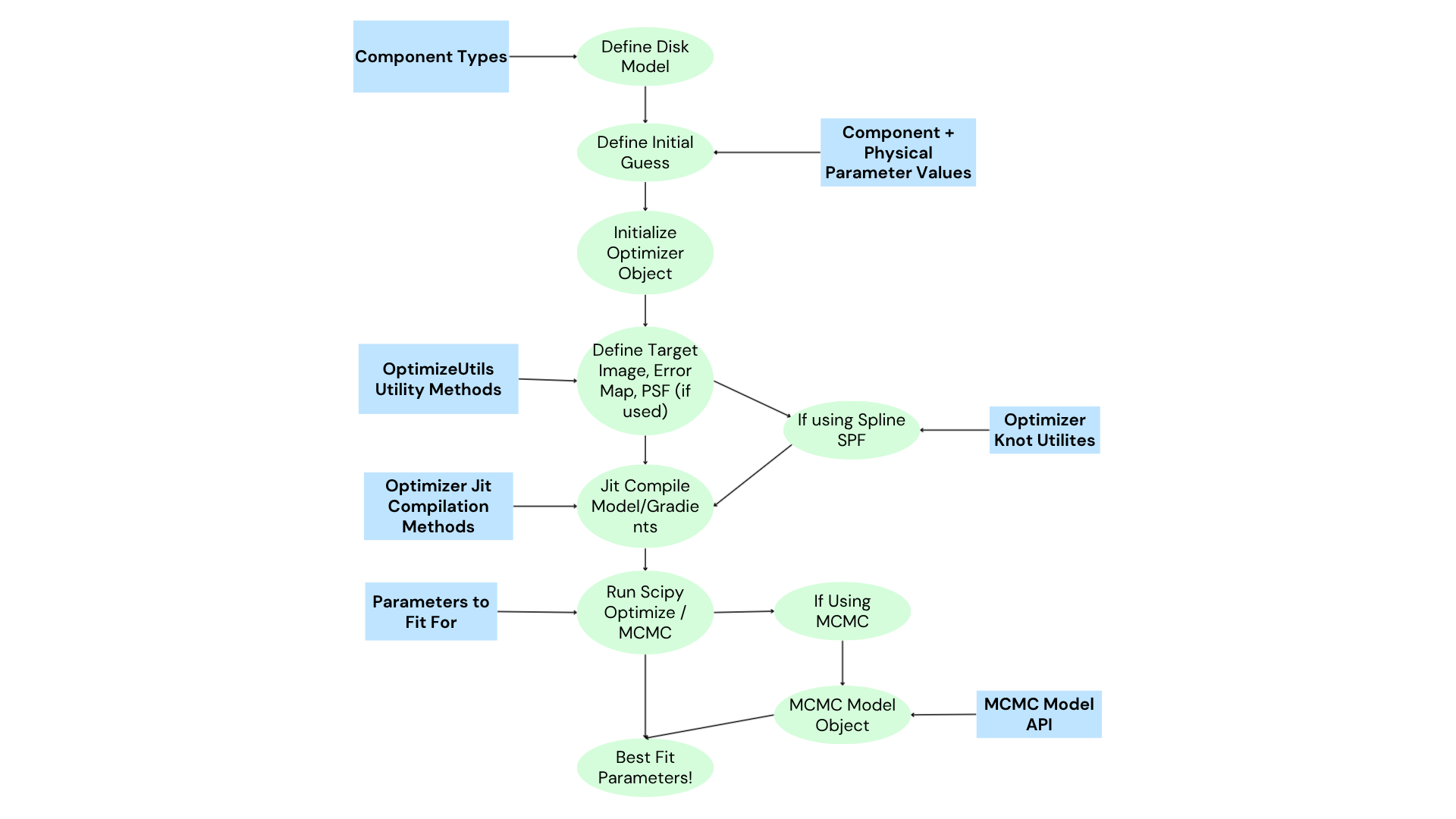
Key stages
Define Disk Model
Dust distribution
Scattering phase function (SPF, e.g. Henyey-Greenstein vs. Spline)
On-axis / off-axis PSF handling (Optional)
Define Initial Guess
Morphological parameters
SPF parameters
Throughput maps / misc parameters (e.g. distance to system, flux scaling)
Initialize Optimizer
Creates a central object coordinating data, parameters, and JAX functions
Target Image & PSF Setup
Image preprocessing
Error map construction
Optional empirical PSF injection
JIT Compilation
Forward model
Gradients (analytic via JAX automatic differentiation)
Optimization / MCMC
SciPy minimization or
MCMC sampling
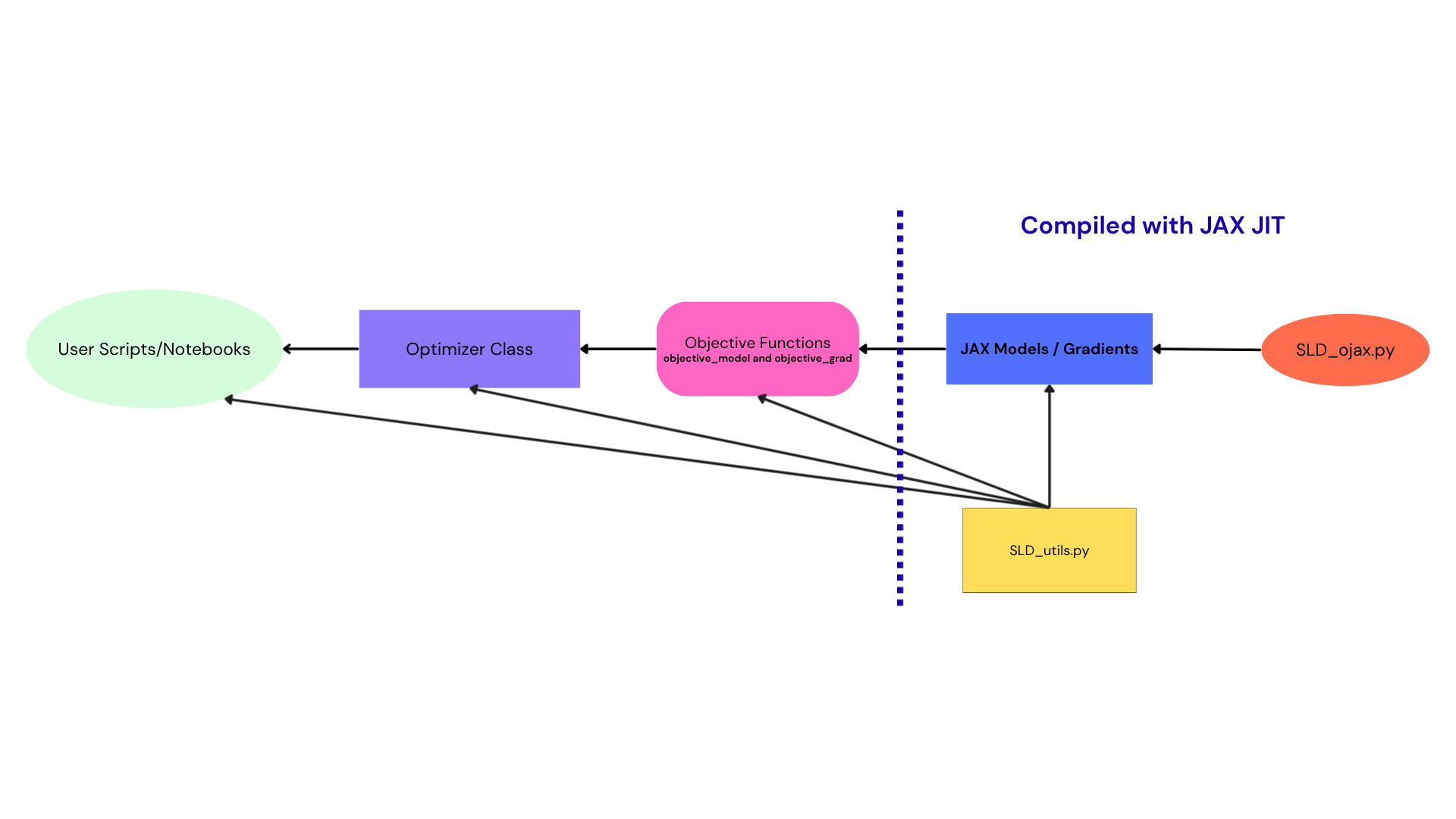
4. Internal Code Architecture
GRaTeR-JAX is organized around a clean separation of concerns. The diagram below shows how the main modules interact.
Core components
Tutorials
Disk Modeling Basics (Tutorials)
Advanced Disk Modeling (How-Tos)
SPFInjectionRecoveryTutorial.ipynb (How-Tos)
Speed Comparisions (Tutorials)
Optimizer Class
Front facing API for disk fitting
Handles disk component parameters
Compiles objective model and gradient
Excecutes gradient-descent/MCMC fitting
Objective Functions
objective_modelobjective_gradWrap JAX disk models into scalar likelihoods
JAX Models / Gradients
Pure, functional disk forward models
Fully differentiable
No side effects
SLD_utils.py
Shared utilities:
Image preprocessing
PSF handling
Data normalization
Used by both:
Objective functions
Optimizer logic
SLD_ojax.py
Low-level JAX disk model definitions
Performance-critical code
Peripheral Components (In Development)
winnie_class.py
Provides the JAX-compatible
WinniePSFimplementationApplies spatially varying JWST PSFs across spacecraft roll angles
Integrates optional Winnie PSF support with the model-generation and optimization pipeline
winnie_jwst_fm.py
Contains utilities adapted from the Winnie package for generating JWST NIRCam PSF grids
Supplies PSF index maps, coronagraph masks, and supporting image-processing functions
Primarily used by
winnie_class.pywhen constructing aWinniePSFfrom a spaceKLIP database
5. JAX JIT Compilation Strategy
One of the key design goals of GRaTeR-JAX is performance without sacrificing clarity.
Disk models are written as pure JAX functions
Objective functions wrap those models
The optimizer JIT-compiles once, then reuses compiled kernels
This results in:
Massive speedups over legacy NumPy implementations
Stable gradients for both optimization and MCMC
Identical code paths for CPU and GPU execution
Note: Autodiff is Jitted by default for better runtime
6. Where to Go Next
Tutorials
Basic disk modeling and benchmarking.
How-Tos
Model read debris disk data using autodiff
Perform MCMC and SPF injection recovery
API reference
See module-level documentation in the optimization and disk_model subpackages
This page is intentionally conceptual. Once this mental model is clear, the individual APIs and classes should feel significantly easier to navigate.